Аварийная посадка: робот-трансформер оказался на Луне и сделал исторический снимок (фото)

Лунный робот проработал 100 минут и передал ученым на Землю фотографии перевернутого посадочного модуля на поверхности Луны.
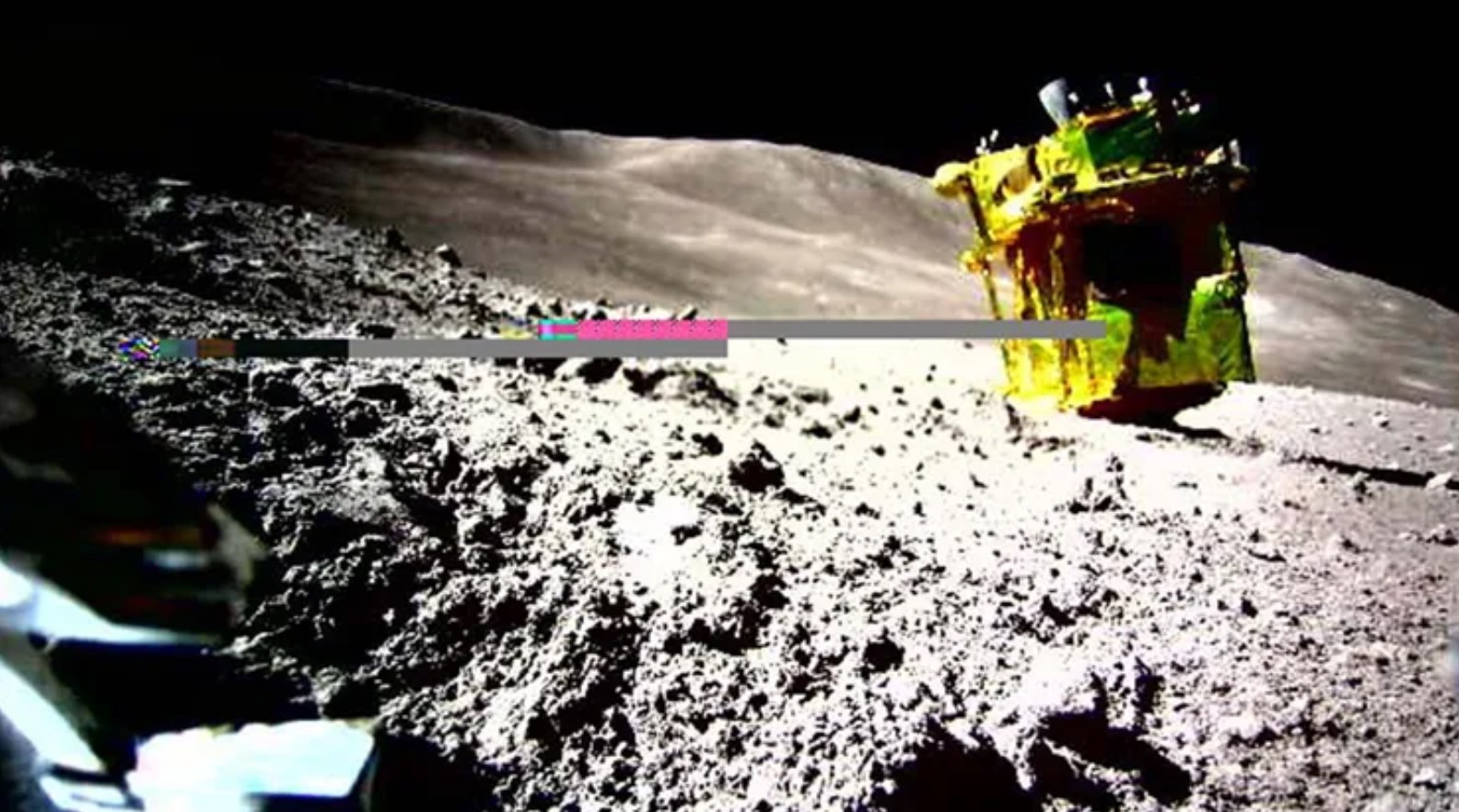
Японский посадочный модуль SLIM совершил аварийную посадку на Луну в январе 2024 года и именно робот-трансформер LEV-2 сообщил ученым о том, что случилось. В течение 100 минут робот в автономном режиме перемещался по поверхности Луны сделал фотографию перевернутого посадочного модуля SLIM и пережал ценные научные данные на Землю. Теперь японские ученые в новой статье, опубликованной в журнале Science Robotics, описали некоторые детали этой миссии и объяснили, какую роль такие роботы могут сыграть в будущих миссиях на Луну, пишет Live Science.
Робот LEV-2, способный менять свою форму в зависимости от рельефа местности, был доставлен на Луну с помощью посадочного модуля SLIM 19 января 2024 года. Япония тогда вошла в историю, как пятая страна посадившая свой аппарат на поверхность Луны.

Но оказалось, что SLIM во время посадки приземлился "вверх ногами" и у него возникли проблемы с генерацией электроэнергии из-за неправильной, ориентации солнечных панелей. Пока SLIM работал на резервной энергии своих батарей, он выпустил робота LEV-2, который перемещался по поверхности Луны в течение 100 минут и сделал историческую фотографию модуля SLIM, а затем передал ее на Землю. Данные LEV-2 позволили ученым устранить неполадки в работе SLIM.

{kind=link}
{kind=link}
Изначально миссия модуля должна была продолжаться в течение двух земных недель, но к удивлению ученых, SLIM получил достаточно солнечной энергии, чтобы пережить сразу три очень холодные ночи на Луне. Каждая такая ночь продолжается примерно 14 земных дней. В итоге модуль передавал данные с Луны в феврале, марте и апреле и его миссия была признана законченной только в августе.
Авторы статьи говорят, что LEV-2 в течение короткого периода времени перемещался по Луне, делал изображения поверхности и проводил автономное исследование соседнего мира. Также он предоставил критически важные данные о результатах посадки.
LEV-2 также продемонстрировал технологии, которые будут иметь решающее значение для будущих миссий на Луну и Марс, говорят ученые. Это касается возможности изменения формы робота для того, чтобы подстроится к практически любым формам рельефа.
По словам ученых, такие роботы позволят обеспечить более эффективные исследовательские миссии на Луне, Марсе и других планетах, ведь они могут попасть туда, где не смогут оказаться крупные космические аппараты.
И все же исследователи отметили, что, хотя LEV-2 достиг поставленных целей, данная технология нуждается в улучшении.
Другие новости науки
- NASA представило экипаж новой лунной миссии в рамках программы "Артемида" и поделилось информацией, как будет проходить миссия "Артемида-3".
- Китай строит самый большой в мире танкер для перевозки сжиженного газа: длина 344 метра.